|
|
|||||||
|
Выбор и использование персональных навигаторов GPS |
|||||||
| | Главная | | Описания | | Статьи | | Программы | | Загрузка | | Ссылки | | Разное | |
|
|
|||||||
|
Выбор и использование персональных навигаторов GPS |
|||||||
| | Главная | | Описания | | Статьи | | Программы | | Загрузка | | Ссылки | | Разное | |
|
Режим кинематики реального времени в свете модернизации системы GPS и использования Galileo Планируемая модернизация системы глобального позиционирования GPS (Navstar) и развитие европейской системы Galileo в значительной мере увеличит доступность сигналов для группы пользователей GNSS. Это принесёт значительную пользу при решении задач, где необходимо быстрое и точное позиционирование. В этой статье обсуждается ряд вопросов, касающихся последствий модернизации для разработки приёмников и программного обеспечения, а также технологии разрешения неоднозначности фазовых измерений. Модернизация навигационных систем GNSS будет бесспорно способствовать развитию и улучшению пользовательских приложений во многих областях, посредством применения гибридных приёмников GNSS. Такое развитие GNSS включает реализацию системы Galileo, находящейся в данный момент на этапе утверждения технического задания совместным руководством Европейской Комиссии (EC) и Европейского Космического Агентства (ESA), как планируемую улучшенную копию американской системы GPS (Navstar). Пользу от добавочных GNSS сигналов можно было наблюдать (в ограниченной форме) с середины 90-х годов, когда российская система ГЛОНАСС обеспечила ограниченное количество космических аппаратов на орбите. Ожидаемая польза, часто характеризуемая в терминах улучшения возможностей позиционирования в городских условиях, подразумевает увеличение доступности сигналов GNSS от дополнительных спутников. Модернизация GNSS также окажется очень полезной для позиционирования в режиме кинематики реального времени (RTK), предоставляя значительное повышение точности – сантиметрового и даже миллиметрового уровня. Типичные RTK приложения включают в себя наземную съёмку, геодезию, мониторинг окружающей среды и искусственных сооружений (например, дамб, зданий и мостов) а также автоматический контроль за машинами (строительное и горнодобывающее оборудование, транспорт и авиация). Преимущества для режима реального времени RTK связаны с появлением дополнительного числа высококачественных сигналов, так и благодаря улучшению геометрии из-за большего числа доступных спутников, что будет влиять на снижение фактора ухудшения точности позиционирования (PDOP). Наиболее значимое преимущество будет получено при улучшении разрешения целого числа неоднозначностей, возникающего при слежении за фазой несущей, т.е. определении неизвестного числа полных циклов колебаний несущей между приёмником и передатчиком. Планы модернизации GPS спутники Block IIR-M (модернизированная базовая модель) и IIF (следующее поколение) будут передавать также незашифрованный гражданский сигнал L2 (L2CS) на второй несущей частоте, что значительно упростит слежение за этим сигналом и сделает его более устойчивым. В дополнении вводится сигнал названный L5, со средней частотой 1176.45 МГц – который будут передавать GPS спутники IIF и GPS спутники III поколения, которые находятся в стадии разработки. Частоты L5 и L2CS будут обычной компонентой данных свободного доступа, что должно улучшить слежение за фазой несущей. Система Galileo, также добавит несколько дополнительных сигналов, позволяющих существенно улучшить процесс разрешения фазовой неоднозначности, часто называемый TCAR (тройное разрешение неоднозначности фазы несущей) или MCAR (множественное разрешение неоднозначности фазы несущей). Решение неоднозначности целого числа циклов фазы несущей является решающим шагом в достижении высокоточных результатов, включающих RTK приложения. Коэффициент успешного разрешения неоднозначности используется для вычисления вероятности нахождения правильного решения целого числа фазовых циклов. В этой статье подробно рассмотрены ожидаемые преимущества от комбинированного использования сигналов систем GPS и Galileo в высокоточных приёмниках и на рынке RTК приложений. После описания планируемого частотного сценария для совмещённых приёмников GPS/Galileo мы сделали краткий обзор существующих систем RTK. Приёмники с программно реализованным коррелятором (SWK), тесно связаны с инерционными навигационными системами (INS) и современными беспроводными коммуникационными технологиями, которые могут улучшить RTK позиционирование в следующих поколениях приёмников. Кроме того, мы продемонстрировали теоретические возможности улучшения коэффициента успешного решения неоднозначности, рассчитав этот коэффициент только для GPS приёмников и для совместных GPS/Galileo приёмников, основанных на лямбда-методе (LAMBDA). Так как мы рассматриваем только мгновенные разрешения неоднозначности, которые основываются на одной эпохе наблюдений, у нас нет необходимости различать движущиеся и стационарные приёмники. Наши тесты показали, что использование совместных GPS/Galileo систем однозначно увеличивает коэффициент успешного решения неоднозначности для коротких и средних базовых линий. GPS сценарий Существующее созвездие спутников GPS Block II и IIA передает С/А код только на частоте L1, тогда как шифрованный Р-код модулирует обе частоты L1 и L2. Спутники GPS Block IIR, также названные спутниками обновления, запускаются с 1997 года на смену более старым космическим аппаратам Block II (и IIA). Главное различие между спутниками Block II и IIA состоит в изменённом фазовом центре антенны и более поздним временем разработки. Спутники модернизированной версии Block IIR-M планируется начать запускать в 2003 году с С/А кодом и L2CS или C/A кодом, которые будут модулировать частоты L1 и L2 соответственно. Кроме того, военный М-код рассчитан для модуляции обеих несущих. В таблице 1 показано текущее планирование спутников и увеличение количества сигналов. Таблица 1. Программа модернизации GPS.
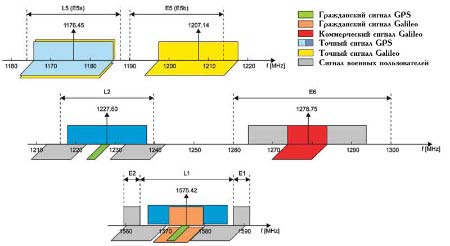
Пока спутники Block IIR-M не излучают сигнал на третьей частоте, слежение за несущей частотой L2 станет значительно проще, отношение сигнал/шум по второй частоте улучшится. Этот факт важен для приложений в режиме кинематики, так как доступность гражданского кода на частоте L2 в спутниках GPS IIR-M уменьшит вероятность потерь захваченного сигнала из-за ионосферных возмущений, температурных шумов в радиотракте приёмника, нестабильности генератора или быстрых перемещений приёмника. Все эти факторы воздействуют на сигнал L2. Новый GPS сигнал L5 Вообще говоря, кроме доступности третьей частоты, которая сама по себе может способствовать быстрому разрешению неоднозначности, гражданский код L5 можно считать подобным существующему P(Y) коду: схема модуляции, квадратурная фазовая модуляция или QPSK(10), являются аналогичными; многолучевые огибающие такие же, как для P(Y) кода. Многолучевые огибающие определяют величину эффекта фактической задержки многолучевого сигнала в ошибке отслеживания кода первичного сигнала. Сигналы L5 и L2CS позволяют осуществить последовательное слежение за фазой и кодом и компенсируют квадратурные потери обработки с которыми сталкивается приёмник, когда необходимо определить неизвестные биты навигационного сообщения. Время интегрирования, или другими словами, период корреляции входящих и локально генерируемых сигналов, не зависит от скорости передачи данных, так как код и информационные биты данных отделены друг от друга, что делает сигналы L5 и L2CS намного больше устойчивыми, чем L1 и L2. Состояние системы Galileo Основные направления проекта разработки сигнала системы Galileo были представлены в статье "The Galileo Frequency Structure and Signal Design" Гантером Хейном и другими авторами. Несущие частоты и схемы модуляции системы Galileo уже определены, что даёт возможность оценить воздействие Galileo на точность позиционирования в режиме RTK. Рисунок 1 показывает частотный план, а таблица 2 демонстрирует, как будут использоваться новая модуляция и схемы мультиплексирования.
Таблица 2
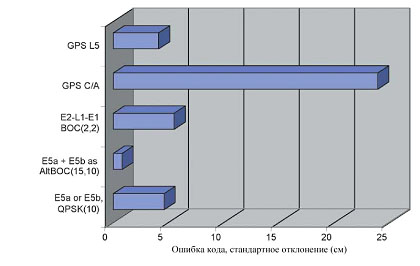
Сигналы Galileo Система Galileo будет передавать несколько навигационных радиосигналов в частотных диапазонах E5a, E5b, E6 и E1-L1-E2. Сигналы “Открытого Сервиса” (Open Service), передаваемые в диапазонах E5a, E5b и E1-L1-E2 будут доступны пользователям RTK систем бесплатно. Вообще, каждая возможная полоса частот имеет определенные преимущества и недостатки. Например, E6 - очень широкий частотный диапазон, но содержит только зашифрованный сигнал Коммерческого Обслуживания (Commercial Service) и Общественные Регулируемые Сервисные сигналы (Public Regulated Service). Кроме того, сигнал E6 может быть подвержен помехам от работы радаров и риск зашумления сигнала еще не был точно оценен. E5 характеризуется наличием сигналов Открытого Сервиса и широким частотным диапазоном, но он чувствителен к воздействию интерференционных помех (DNE), особенно на больших высотах. Распределённый спектр сигнала в диапазоне E2 - L1 - E1, возможно с основными лепестками E1 и E2 имеет небольшую взаимную корреляцию с GPS сигналом L1, но требует наличия модуля обработки сложного кода в приёмнике. Преимущество E5 и E2-L1-Е1 состоит в том, что эти сигналы должны быть расположены в частотном диапазоне Радионавигационной Службы Аэронавтики (ARNS) и это обстоятельство будет выгодно для авиации. Разнообразие гражданских и коммерческих сигналов может использоваться для позиционирования в режиме RTK с помощью комбинированного приёмника GPS - Galileo, а подмножество этих сигналов может быть выбрано для решения конкретных задач в приложениях RTK. Особый интерес представляют пары сигналов - Galileo E2-L1-Е1/GPS L1 и Galileo Е5а/GPS L5. Такой выбор позволил бы целой радиочастотной (RF) линейке гибридных антенн/приёмников, включая аналого-цифровые преобразователи, быть идентичным для соответствующих пар сигналов. Простой дизайн приёмника (детали будут обсуждены позже) и одинаковые задержки аппаратных средств приёмника следуют из выбора этих объединенных сигналов. Данный выбор включает сдвоенную смещенную фазу несущей Открытого Сервиса Galileo или сигнал ВОС (2,2) в верхней L полосе с избытком в сторону сигнала GPS L1. ВОС сигнал Общественного Регулируемого Сервиса также передаётся в диапазоне E2-L1-E1 и методика для комбинации всех сигналов спектрального разбиения Galileo также должна быть определена. Несущая сигнала Galileo центрирована на той же самой частоте (1575.42 МГЦ) что и для GPS сигнала L1. Когерентная (с разделением спектра) обработка полосы частот обеих сторон разделенного спектра в RTK приёмнике будет необходима, чтобы получить фазу несущей на центральной частоте. В низкочастотной части L-спектра расположены диапазоны E5a и E5b с центральными частотами 1176.45 и 1207.14 МГЦ соответственно. Диапазон E5b отделен от GPS L5-диапазона. Обе полосы имеют ширину 24 МГц и закреплены за ARNS. При использовании L5 и E5a, E5b ожидается (возможно) умеренный уровень воздействия дальномерной аппаратуры DME, используемой в авиации. Этот эффект ожидается для пользователей, находящихся рядом с поверхностью Земли или непосредственно на ней. Сигналы Galileo Е5а и E5b могли бы быть переданы по радио как два когерентных сигнала с квадратурной фазовой модуляцией QPSK (10) или как сигнал ВОС (15,10). Когерентное отслеживание E5a и E5b позволит получить чрезвычайно низкую ошибку слежения за кодом, возникшую из-за теплового шума, возможно даже меньше 1 сантиметра и низкие значения ошибки в результате переотражения. Малошумящие диапазоны кодовых сигналов с низкой чувствительностью к переотражению могут помочь в процессе разрешения неоднозначностей. Подобно сигналам GPS L5 и L2CS, компоненты сигнала без данных предусмотрены для всех Открытых и Коммерческих Сервисных сигналов Galileo, что приводит к улучшенному слежению за фазой несущей. Соответственно, никакие полукодовые методы (они в настоящее время используются, для слежения на L2 GPS ) не нужны для слежения за сигналами Открытого Сервиса Galileo. Подводим итоги. На рисунке 2 показаны характерные значения ошибки слежения псевдодальномерного кода, возникшей из-за теплового шума высокоточного RTK приёмника. Хотя новые GPS IIF и Galileo сигналы имеют малошумящий код, надо отметить, что ошибка в псевдодальномерном коде из-за переотражения все же будет значительно большей. Поэтому, слежение за кодом, наиболее вероятно, не заменит отслеживания фазы несущей для высокоточных приложений. Точность слежения за фазой несущей зависит главным образом от мощности сигнала, а не от схемы модуляции и таким образом, будет более или менее одинакова для всех навигационных сигналов.
Созвездие Спутников
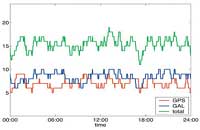
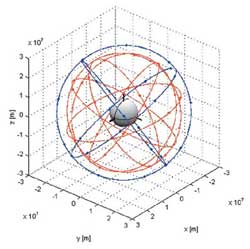
Для системы GPS, как составляющей части объединенной GNSS, мы использовали базовую функциональность с созвездием из 24 спутников, как описано в статье "The GPS Constellation Design - Current and Projected" и “Global Positioning System: Signals, Measurements, and Performance”. На круговых орбитах работают по четыре спутника в шести орбитальных плоскостях. Четыре спутника не распределены равномерно в пределах одной плоскости - по два спутника обособленно, с углом между ними приблизительно 30 градусов. Ключевые параметры - орбитальный радиус 26560 километров и склонение 55 градусов относительно экваториальной плоскости. Созвездие Galileo состоит из 27 спутников в трех орбитальных плоскостях, каждая с 9 спутниками, равномерно распределенными в пределах круговой орбиты. Ключевые параметры - орбитальный радиус 29994 километров и склонение 56 градусов. Чтобы обеспечивать необходимую избыточность на орбите и позволить быстрое восстановление в случае отказа спутников, предполагаются три активных резервных спутника, по одному в каждой орбитальной плоскости. Основные параметры созвездия Galileo перечислены в Таблице 3. На рисунке 3 показано количество спутников, находящихся выше угла отсечки в 10 градусов за весь день для объединенной системы GPS - Galileo. Таблица 3. Параметры элементов орбиты для спутников Galileo.
В следующем обсуждении мы принимаем совместимость базовых систем GPS и Galileo - это подразумевает, что геодезическая основа Galileo привязана к ITRF наряду с системным временем Galileo, синхронизированным с атомным временем [TAI/UTC]. Двухсистемные приёмники
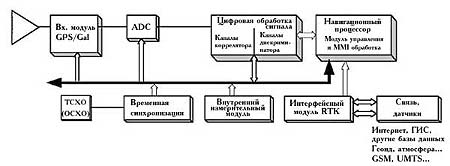
Современные технологии сделали приёмники дешевыми и позволили создавать их компактными и с низкой потребляемой мощностью. В производстве двухсистемных GPS-Galileo RTK приёмников, которые будут использоваться для высокоточных приложений, очень важно с минимумом затрат спроектировать входной ВЧ модуль. Это основная проблема при использовании различных спутниковых навигационных систем. Урок, полученный из опыта эксплуатации российской системы ГЛОНАСС показал, что применённая в этой системе концепция множественного доступа c частотным мультиплексированием (FDMA) (по сравнению с множественным доступом с кодовым разделением каналов систем GPS и Galileo, или CDMA) коммерчески менее удобна. Необходимость обрабатывать сигналы на многих различных несущих приводит к высокой сложности входного ВЧ модуля (сложный синтезатор, множественные входные модули, многочисленные антенны). Более сложной при обработке сигналов в приёмнике с гибридной архитектурой является вторая проблема, потому что все остальные решаются применением дешевых цифровых схем и программным обеспечением. Двухсистемный RTK приёмник GPS-Galileo будет иметь минимум два ВЧ входа (L1, L5). Использование E5b вместо, или в комбинации с E5a, подразумевает использование тройного входа или широкой входной полосы покрытия E5a и E5b. Дополнительный вход требуется также, если используются частоты L2 или E6. Различные несущие частоты также требуют различного оборудования или разных аппаратных задержек. Эти задержки зависят от частоты. Каждая дополнительная частота приводит к появлению дополнительного неизвестного, которое безусловно может быть найдено для множества спутников, находящихся в поле зрения. Однако, для RAIM (приёмника, самостоятельно контролирующего целостность) необходима избыточность и рабочие ресурсы RAIM будут использоваться при проведении наблюдений, чтобы непрерывно калибровать ВЧ входы. Краткий обзор технологии RTK Большая часть существующих в настоящее время RTK приёмников использует двойные разности фазы несущей GPS и/или ГЛОНАСС измерений, чтобы определить местоположение подвижного приёмника. Типичная номинальная точность для двухчастотной системы - 1 сантиметр ± 2 ppm (в плане) и 2 сантиметра ± 2 ppm (по высоте). Время ожидания определения местоположения изменяется от 20 мс до 100 мс (для различных приёмников). Если приёмник работает в синхронизированном режиме RTK, время ожидания зависит в основном от времени ожидания радиоканала связи. Точность определения местоположения значительно ухудшается, если неоднозначность двойных разностей не решена или решена неправильно. В последнем случае ошибки в плане могут легко превзойти один метр. Поэтому, надежная фиксация решения - вероятно, самый важный аспект для RTK систем. Все другие источники ошибок, например, поправки из-за нестабильности атмосферы, переотражение сигнала (многолучёвость), ошибки орбитальных элементов спутников или приборные ошибки - имеют порядок от нескольких миллиметров до нескольких сантиметров. Дальнейшее усовершенствование приёмников Двухсистемные RTK приёмники для систем Navstar и Galileo вероятно будут доступны в начале 2005 года. Благодаря внедрению Galileo, приёмники RTK систем станут более дешёвыми и значительно удобней, из-за стремительного развития технологий цифрового оборудования и коммуникаций.
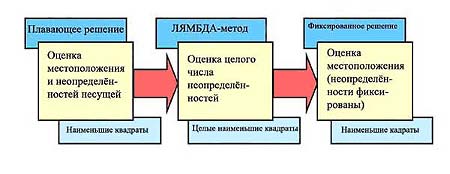
Главное отличие заключается в антенне, которая должна быть предназначена для всех рабочих частотных диапазонов. Это особенно важно для приложений, требующих высокой точности, где все фазовые центры антенны и их изменения должны быть калиброваны и определены с точностью около миллиметра. Требования к малошумящим усилителям и к гетеродинам с преобразованием вниз остаются в целом неизменными. Приёмник должен быть способен справиться с возможным посторонним внешним воздействием от других радионавигационных сигналов (DME, радары) в E5a, Е5b и E6 диапазонах. Мы ожидаем, что за следующие несколько лет на рынке будут развиваться экономичные инерционные навигационные системы. Если они будут интегрированы в RTK системы, они позволят уменьшить пропускную способность системы слежения за фазой и кодом, сокращая влияние ошибки теплового шума и позволяя совершать повторный захват сигнала более быстро. Конечно, инерционные навигационные датчики будут также использоваться, для компенсации выхода из строя спутников. Изменения в приёмниках могут коснуться и области корреляции сигнала и части обработки, особенно на начальной стадии Galileo. Это позволит испытывать различные варианты комбинирования сигналов и алгоритмов обработки для оптимизации работы системы RTK, которая может быть достигнута применением так называемых программно коррелированных приёмников (SWC). Эти приемники, вероятно, получат привилегированную позицию по сравнению с аппаратно коррелированными приёмниками из-за менее дорогой аппаратной части. До какой степени программно коррелированные приёмники будут иметь преимущества, как массовые рыночные изделия, станет ясно в будущем. Требования к процессору SWC RTK системы (который мог бы быть цифровым сигнальным процессором или центральным процессором стандартного PC) чрезвычайно высоки. Для обработки единственного канала кода C/A однокристальным коррелятором требуется быстродействие обработки до 4-х MIPS (миллион команд в секунду). Увеличение пропускной способности от 2 до 20 МГц, необходимое для обработки широкополосных сигналов, увеличивает необходимую пропускную способность в 10 раз. Чтобы уменьшать уровень шума квантования, осуществление выборки сигнала должно быть выполнено не менее чем с двумя битами вместо одного, что также увеличивает требования к быстродействию в три раза. Наконец, 48 каналов (12 каналов для каждого сигнала в комбинациях L1/L5 и E1/E5) должны быть обработаны одновременно и по ним должны непрерывно производиться измерения фазы несущей. Объединение всех вышеприведённых коэффициентов ведет к необходимой производительности всей системы на уровне 5760 MIPS. Эти требования в настоящее время являются предельно возможными для доступных сигнальных процессоров. Преимущества навигационного процессора Важные усовершенствования также коснутся и навигационных процессоров. Разработка алгоритмов для надежной фиксации неопределённостей приведет к существенному усовершенствованию работы устройств, также как и при использовании новых телекоммуникационных возможностей. Поскольку точная информация об ионосферной модели необходима для работы RTK с длинными базовыми линиям, ионосферное моделирование должно быть сделано сетью референцных приёмников, а не только подвижным приёмником. Для решения этой задачи существует много различных методов. Во всех случаях различные базовые приёмники должны иметь связь между собой. Поскольку позиционирование RTK требует всего лишь умеренных скоростей передачи данных, использование усовершенствованных каналов передачи данных GSM типа GPRS, HSCSD, или UMTS в будущем идеально бы удовлетворяло эти потребности. Главное преимущество этих технологий состоит в том, что установление канала связи достигается легко, быстро и независимо от существующих телекоммуникационных линий связи. В идеале, программное обеспечение сети RTK будет частью каждого индивидуального RTK приёмника. Последовательное использование новых возможностей связи также позволило бы подключать в реальном времени географические информационные системы, тропосферные поправки из цифровых моделей предсказания погоды и многие другие приложения. Разрешение неоднозначности Как было упомянуто раньше, решающий шаг к точному RTK позиционированию – правильное решение неоднозначности. Определение точных координат на уровне порядка миллиметров - сантиметра, в пределах короткого промежутка времени наблюдения, становится доступным только после правильного определения значений целочисленных неоднозначностей. Для этого мы используем ЛЯМБДА-метод решения неоднозначности фазы несущей. При помощи этого метода, неоднозначность для спутниковых систем GPS и Galileo, с одной, двумя, тремя (или даже большим количеством) несущими частотами, могут быть обработаны все с одной интегральной целочисленной корректировкой. При использовании ЛЯМБДА-метода, взвешенные дальности, выраженные псевдодальностным кодом и фазой несущей соответственно, связаны с неизвестными параметрами через универсальные уравнения измерения (недифференциальные, выражены в метрах)
прикреплённые для каждого сигнала частоты L-диапазона, i = L1, L2, L5, E2-L1-E1, E6, E5a и E5b. Неизвестные параметры - геометрическое расстояние r от спутника до приёмника, ошибка часов d и d, для приёмника и спутника, ионосферная и тропосферная задержка, I и T, неопределённость N для фазы несущей и шумовые составляющие e и e. В режиме разностного позиционирования, составляющие ошибки часов (и возможные аппаратные задержки на частоту или тип измерения) компенсируются, когда двойные разностные комбинации измерений вычисляются по двум участвующим станциям и по спутникам. Кроме шума, с комбинацией двойных разностных геометрических расстояний остаются, составляющие разностной атмосферной задержки, и двойные разностные неопределённости, которые, как известно, являются целым числом. Геометрические расстояния или их комбинации обычно линеаризируются в неизвестные координаты приёмника. Это означает, что геометрические расстояния ко всем отслеживаемым спутникам полностью связаны с координатами приёмника. Последующая обработка данных выполняется в три этапа, как показано на рис. 6. На первом шаге, "обычный" метод наименьших квадратов, либо в пакетном исполнении, либо используя фильтр Калмана, приводит к лучшему решению, основанному на всех доступных данных сразу, но не рассчитывает целое количество циклов для неопределённостей фазы несущей. Решения - называемые "плавающими" вычислены для всех параметров, включая базовые координаты, дифференциальные атмосферные задержки, и неопределённость фазы несущей. На втором шаге, плавающие решения "отображаются" (все вместе) в целочисленные значения, используя строгий принцип оценки наименьших квадратов, осуществленный в ЛЯМБДА-методе. На последнем шаге, вычисляется установленное решение, прежде всего, для базовых координат, в то время как неопределённости сохраняются установленными к целочисленным значениям. Эти окончательные координаты имеют точность порядка сантиметра, или лучше. Принцип наименьших квадратов, воплощенный в ЛЯМБДА-методе, продемонстрирован здесь с целью доказательства его оптимальности. Целочисленная оценочная функция наименьших квадратов является наилучшей в смысле максимальной вероятности правильной целочисленной оценки. Эти недвусмысленные измерения, с учётом некоторого сценария, могут находиться в решении целочисленных неопределённостей фазы несущей. Коэффициент успешного решения неопределённости - статистическая вероятность - представляется числом между 0 и 1 (можно понимать, как 0 процентов и 100 процентов, соответственно). Поскольку точная оценка этого коэффициента успешного решения усложнена в контексте целочисленной оценки наименьших квадратов, мы используем приближение, основанное на так называемой начальной загрузке. Коэффициент успешного решения начальной загрузки гарантирует нижнюю границу коэффициента успешного решения; фактический целочисленный коэффициент успешного решения для метода наименьших квадратов будет больше чем (либо равен) данному значению. Второй шаг ЛЯМБДА-метода, проиллюстрированный на рисунке 6, является независимым и применяется, как правило для целочисленной оценки модуля. Метод не зависит от количества GNSS частот и от отсутствия измерений кода псевдодальностей на отдельно взятой частоте или случайно утраченных измерений для некоторых спутников.
Испытания и результаты В ряде испытаний, мы сравнили способность сигналов систем GPS и Galileo в различных комбинациях решать неопределённость целого числа циклов колебаний фазы несущей. При исследованиях рассматривались три различные базовые линии: на короткой базовой линии где дифференциальные атмосферные задержки приняты полностью отсутствующими. Такие задержки, однако, должны быть введены на средних и длинных базовых линиях. Короткая базовая линия имеет длину обычно несколько километров; средняя базовая линия 20-30 километров или больше, (когда используется корректирующая информация от сети активных GNSS базовых станций) и длинная базовая линия (может быть равна сотням и тысячам км).
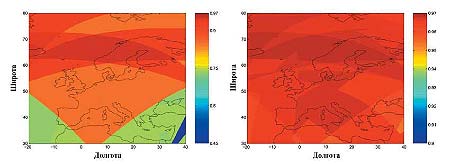
Полные результаты этих исследований могут быть найдены в статье "Integral GPS-Galileo Ambiguity Resolution" Кристиана Тибериуса и других работах. На рис. 7 приведена карта распределения коэффициентов успешного решения неоднозначности фазы несущей (географическое местоположение в Европе), для GPS и объединённой системы GPS-Galileo. Использовалась средняя базовая линия, без учёта дифференциальной тропосферной задержки, но с учётом дифференциальной ионосферной задержки. На фиксированную эпоху времени, мгновенный коэффициент успешного решения был вычислен с сеткой 0.1 градуса. Исследования ясно показывают, что объединённая система GPS-Galileo превосходит нынешнюю двухчастотную систему GPS. Нужно обратить внимание на отчётливое различие в цветокодирующей шкале между двумя графами. С объединенной системой GPS-Galileo коэффициент успешного решения всюду становится больше чем 0.95 для единственной рассматриваемой эпохи. Заключение Будущие приёмные GPS RTK системы претерпят значительные технологические усовершенствования. В приёмниках с программным коррелятором будет заложена большая гибкость и учтена оптимизация системной работы RTK, даже если конечное изделие все еще будет использовать аппаратные средства (специализированные интегральные схемы ASIC или программируемые пользователем вентильные матрицы FPGA) для корреляции сигнала. Объединенное использование новых сигналов модернизированной системы GPS и будущей системы Galileo значительно увеличит мгновенный коэффициент успешного решения неоднозначности, который будет составлять от 0.999 до 0.99999999 на коротких опорных линиях. Двухсистемный RTK приёмник будет наиболее эффективен для успешного решения неоднозначности по фазе несущей. Повышенный коэффициент успешного решения вызван увеличенным количеством спутников и улучшенной спутниковой геометрией. При необходимости, будет возможно использование третьей частоты (L2 для GPS) или увеличенной точности измерения кода. Различие между GPS и двухсистемной системой GPS-Galileo является наибольшим для коротких базовых линий и уменьшается с увеличением ионосферной неопределенности (т. е. длины базовой линии). Поэтому для будущих RTK систем особое значение имеет ионосферное моделирование. Здесь мы ожидаем, что новые беспроводные технологии связи обеспечат в недалёком будущем быструю и относительно дешёвую установку законченной базовой сети RTK. Авторы: Bernd Eissfeller, Christian Tiberius, Thomas Pany, Gunter Heinrichs (Galileo’s World) Перевод статьи опубликованной в Galileo's World,
Октябрь 2002 |